GUÍA - Laboratorio Máquinas simples- Poleas..pdf
GUÍA - Laboratorio Máquinas simples- Poleas..pdf
GUÍA - Laboratorio Máquinas simples- Poleas..pdf

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
OBJETIVOS<br />
LABORATORIO DE FISICA Nº 1<br />
MAQUINAS SIMPLES PALANCA-POLEA<br />
I.- Lograr el equilibrio estático de objetos que pueden rotar en torno a un eje,<br />
por medio de la aplicación de fuerzas y torques.<br />
INTRODUCCIÓN<br />
El uso de máquinas <strong>simples</strong> en muchas de las actividades que se desarrollan a diario es un<br />
hecho tan común que su aplicación y utilización en el funcionamiento de determinados<br />
dispositivos no nos causa mayor sorpresa. Sin embargo, basta con pensar en la diversidad<br />
de aplicaciones que presenta el funcionamiento de nuestro propio organismo para<br />
descubrir lo importante que es conocer tales principios y ampliar el rol que cumple la<br />
física en este y otros campos de la ciencia y la tecnología.<br />
El estudio del movimiento del cuerpo rígido, es sin duda, de mucho más complejidad que<br />
el de una partícula. Puede abordarse el estudio de un rígido como un caso especial e<br />
importante de sistemas formados por muchas partículas, en el cual las distancias relativas<br />
entre ellas permanece constante.<br />
PROCEDIMIENTO EXPERIMENTAL PRIMERA PARTE<br />
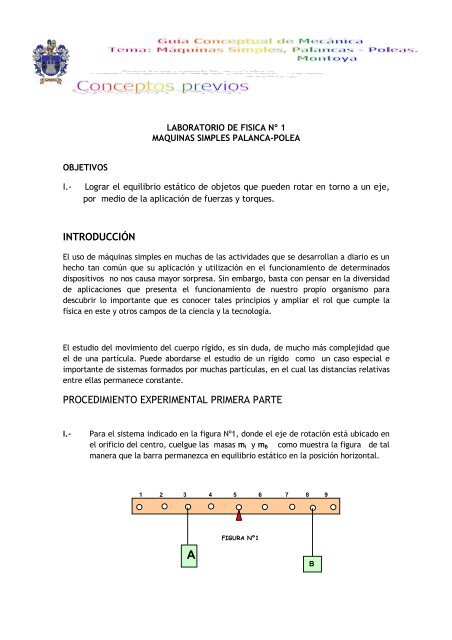
I.- Para el sistema indicado en la figura Nº1, donde el eje de rotación está ubicado en<br />
el orificio del centro, cuelgue las masas mi y mB como muestra la figura de tal<br />
manera que la barra permanezca en equilibrio estático en la posición horizontal.<br />
1 2 3 4 5 6 7 8 9<br />
A<br />
FIGURA Nº1<br />
B
1.- Haga un esquema de “todas” las fuerzas que actúan sobre la barra ( diagrama de<br />
cuerpo libre)<br />
2.- Compruebe que la τ τ fulcro =<br />
= 0 r r<br />
∑<br />
(respecto del fulcro). Se le propone que<br />
complete la tabla siguiente y realice un análisis de la columnas 4 y 8.<br />
1 2 3 4 5 6 7 8<br />
Masa del<br />
Bloque A<br />
Peso<br />
del<br />
bloque<br />
A<br />
Distancia<br />
al eje de<br />
rotación<br />
Torque<br />
respecto<br />
del fulcro<br />
Masa<br />
del<br />
Bloqu<br />
e B<br />
Peso<br />
del<br />
bloque<br />
B<br />
Distancia<br />
al eje de<br />
rotación<br />
Torque<br />
respecto<br />
del<br />
fulcro<br />
3.- Si aleja la masa mA a un extremo, ¿ qué debe hacer con mB para que se<br />
mantenga el equilibrio? ¡ Justifique!<br />
4.- A que tipo de palanca corresponde<br />
5.- De a lo menos tres ejemplos de este tipo de palanca de la vida real<br />
II.- Realice el montaje que muestra la figura Nº2 .En el orificio 1 se encuentra el eje<br />
de rotación, en el orificio 9 se cuelga una masa mA . Aplique una fuerza con una<br />
cuerda en el orificio 3, esta cuerda se hace pasar por una polea fija de modo que<br />
del otro extremo cuelga un bloque de peso conocido. Elija los bloques adecuados<br />
de modo que la barra con orificio permanezca en equilibrio estático en posición<br />
horizontal.<br />
1.- Haga un diagrama con todas las fuerzas que actúan sobre la barra<br />
F r<br />
FIGURA<br />
1 2 3 4 5 6 7 8<br />
B<br />
A
2.- Registre las medidas necesarias que le permitan comprobar el equilibrio estático.<br />
3.- Escriba las ecuaciones que le permitan comprobar las dos ecuaciones del equilibrio<br />
estático, es decir,<br />
r r<br />
Σ Σ F = = 0 ; ∑ τ τ P = =<br />
= 0 r r<br />
4- ¿A que tipo de palanca corresponde?<br />
.<br />
5.- La siguiente figura muestra una palanca de forma similar a la descrita en el punto II.<br />
Eje<br />
de<br />
6- De a lo menos tres ejemplos de este tipo de palanca.<br />
DESARROLLO DE PREGUNTAS EN SU INFORME<br />
1.- Explique los concepto físicos de:<br />
a)Torque o momento de una fuerza<br />
b.- Centro de gravedad.<br />
r<br />
F1 2.- Explique brevemente las características físicas de la palanca de primera, segunda y<br />
tercera clase<br />
r<br />
F2 r<br />
F3
3.- .- Explique brevemente cuales son las condiciones que se deben cumplir para que se<br />
produzca el equilibrio estático.<br />
4.- Identifique dos ejemplos de cada uno de los tipos de palancas que usted puede identificar<br />
en el cuerpo humano.<br />
O<br />
b<br />
Línea de acción de F r<br />
B<br />
r r<br />
θ<br />
ANEXO TEORICO<br />
CONCEPTO DE MOMENTO DE UNA FUERZA O TORQUE ( τ r )<br />
Recordemos que se define el torque o momento de una fuerza τ r con respecto a un<br />
punto 0 como una cantidad vectorial dada por la expresión.<br />
r r r<br />
r<br />
τ τ = = = r × × × F con τ τ = = r F sen θ<br />
θ<br />
o o<br />
F r<br />
r<br />
; τ τ o =<br />
= F b<br />
Donde r r es el vector posición del punto de aplicación de la fuerza F r , medido desde O.<br />
La distancia de la figura anterior ,OB = b , se le llama brazo de palanca . Corresponde a la<br />
distancia entre el punto 0 y la línea de acción de la fuerza F r .<br />
O<br />
τo r<br />
r r<br />
θ<br />
F r
De acuerdo al producto vectorial, el torque τo r , es un vector perpendicular al plano<br />
que forman los vectores r r y F r y el sentido lo da la regla de la mano derecha o del<br />
tirabuzón. Debe especificarse claramente respecto de que punto hace torque la fuerza F r<br />
En coordenadas cartesianas, el torque se puede calcular por medio del determinante:<br />
r<br />
τ τ =<br />
=<br />
o<br />
ˆ ˆ ˆ<br />
i j k<br />
x y z<br />
Fx Fy Fz<br />
r<br />
τ τ = = ˆi yF − − z F − − ˆj x F − − z F + + kˆ xF −<br />
− yF<br />
( Z y ) ( z x ) ( y x )<br />
CENTRO DE GRAVEDAD<br />
Los cuerpos están formados por un gran número de partículas sobre las<br />
cuales actúa la fuerza de gravedad. Se puede demostrar que la fuerza de<br />
todas esas fuerzas individuales tiene el efecto equivalente de una sola<br />
fuerza que actúa en un solo punto que se le conoce como “centro de<br />
gravedad”(c.g) y que corresponde a la fuerza peso mg r del cuerpo<br />
MAQUINAS SIMPLES:<br />
Las máquinas son dispositivos que multiplican una fuerza o bien cambian la dirección de<br />
una fuerza, entre las máquinas <strong>simples</strong> podemos citar a las palancas, las poleas, gatas<br />
hidráulicas, tornos, planos inclinados.<br />
Estas máquinas <strong>simples</strong> nos proporcionan una “ventaja mecánica”. Si se llama Fa a la<br />
fuerza de entrada (esfuerzo) que es la que se aplica a la palanca para mantener o<br />
levantar una carga y FL a la fuerza de salida o fuerza de carga o resistente), entonces la<br />
ventaja mecánica ideal (no se considera perdida por roce) viene dada por:<br />
LA PALANCA<br />
VENTAJA MECANICA = V.M = L F<br />
F<br />
a<br />
F<br />
M<br />
xL<br />
FULCRO<br />
xa<br />
m<br />
;<br />
Fa
La palanca es una máquina simple bastante eficiente. Básicamente está formada por una<br />
barra rígida que se puede hacer rotar respecto de un punto línea que recibe el nombre de<br />
FULCRO.<br />
Según las posiciones que tengan las dos fuerzas y el fulcro, se definen tres clases de<br />
palancas:<br />
Primera clase: el fulcro se encuentra entre ambas fuerzas<br />
Segunda clase: la carga está entre el fulcro y el esfuerzo.<br />
Tercera clase: el esfuerzo está entre el fulcro y la carga.<br />
En el conjunto de figuras siguiente están esquematizadas los tipos de palancas:<br />
Fl<br />
Fa<br />
Fl<br />
LAS POLEAS<br />
Las poleas, al igual que las palancas, son máquinas <strong>simples</strong>. Una polea no es más que una<br />
rueda que puede girar libremente alrededor de un eje que pasa por su centro. Ahora, una<br />
polea o un sistema de poleas es un dispositivo con el cual se puede variar la dirección y la<br />
magnitud de una fuerza para obtener alguna ventaja mecánica. Una polea fija solo<br />
permite cambiar la dirección o sentido de la aplicación de la fuerza y la polea móvil<br />
permite “ahorrar fuerza”.<br />
Fa<br />
Fa<br />
Fl
F r<br />
POLEA FIJA<br />
CONDICIONES DE EQUILIBRIO ESTATICO PARA UN SISTEMA DE FUERZAS<br />
COPLANARES<br />
1.- Un sistema está en equilibrio de traslación cuando la resultante de todas las fuerzas<br />
que actúan sobre el sistema es nula. Para un sistema en un plano se tiene que<br />
cumplir:<br />
r r<br />
Σ Σ F = = 0 ⇒ Fx= 0 ; Fy = 0<br />
2.- Un sistema se encuentra en equilibrio de rotación cuando la suma de todos los<br />
momentos que actúan sobre el sistema es nulo.<br />
∑ τ τ P =<br />
= 0 r r<br />
3.- Para la condición de equilibrio de un cuerpo debe cumplirse que la sumatoria de<br />
las fuerzas debe ser cero y la suma de los torques debe ser cero<br />
Si las fuerzas ( magnitudes vectoriales) están en un plano, entonces esta tiene dos<br />
componentes, que pueden ser Fx y Fy<br />
τ τ = = r × × F<br />
r<br />
r r<br />
F r<br />
POLEA