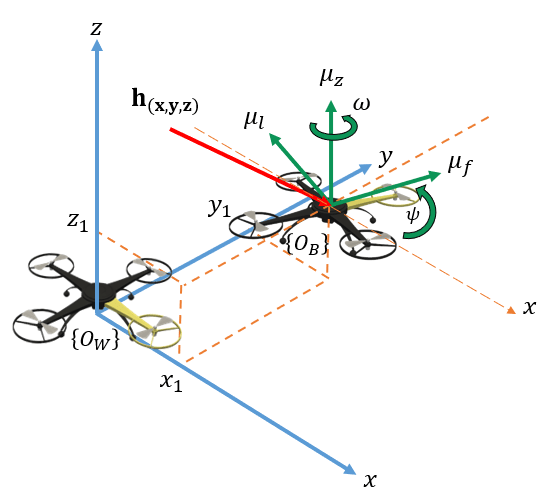
Esta referencia está fija a los ejes del robot, pero con respecto a {𝑂𝑊} es móvil tanto en posición como orientación.
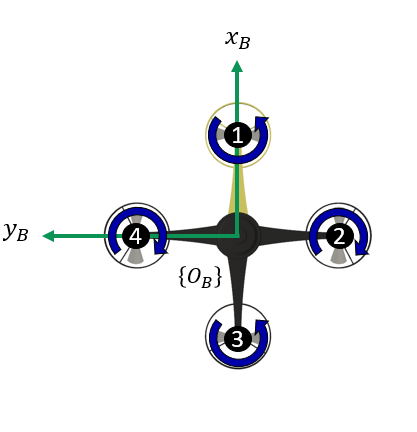
En este caso se ha escogido el brazo de color amarillo como la parte frontal del robot y coincide con el eje X positivo, por lo tanto, el lado izquierdo estaría el eje Y positivo y el eje Z con dirección positiva hacia arriba.